Por: Cristian Jiménez, Raúl Jiménez y Xavier Mora
ENLACES DE INTERÉS:

Durante el periodo del último trimestre del actual curso estudiantil, se ha llevado a cabo diversas prácticas relacionadas con la automatización y programación de un robot a partir de arduino y sus múltiples funciones. Para ello, nos fue entregado un chip, de nombre SN754410NE, para controlar la potencia de los motores.
Para empezar, buscamos todo tipo de información que adjuntamos al final de este mismo escrito, como por ejemplo el esquema de conexión y la tabla de la verdad. Con esta información pudimos empezar el proceso de producción.
En primer lugar, conectamos el chip a la placa protoboard junto al arduino y los motores. Este trabajo nos llevó varios días porque las conexiones fueron más complicadas de lo que pensamos al principio. Lo que más no costó de ajustar a nuestro proyecto fueron los motores, en concreto entender cuál era su funcionamiento y aprender a programar un código simple para comprobar que todo funcionaba bien.
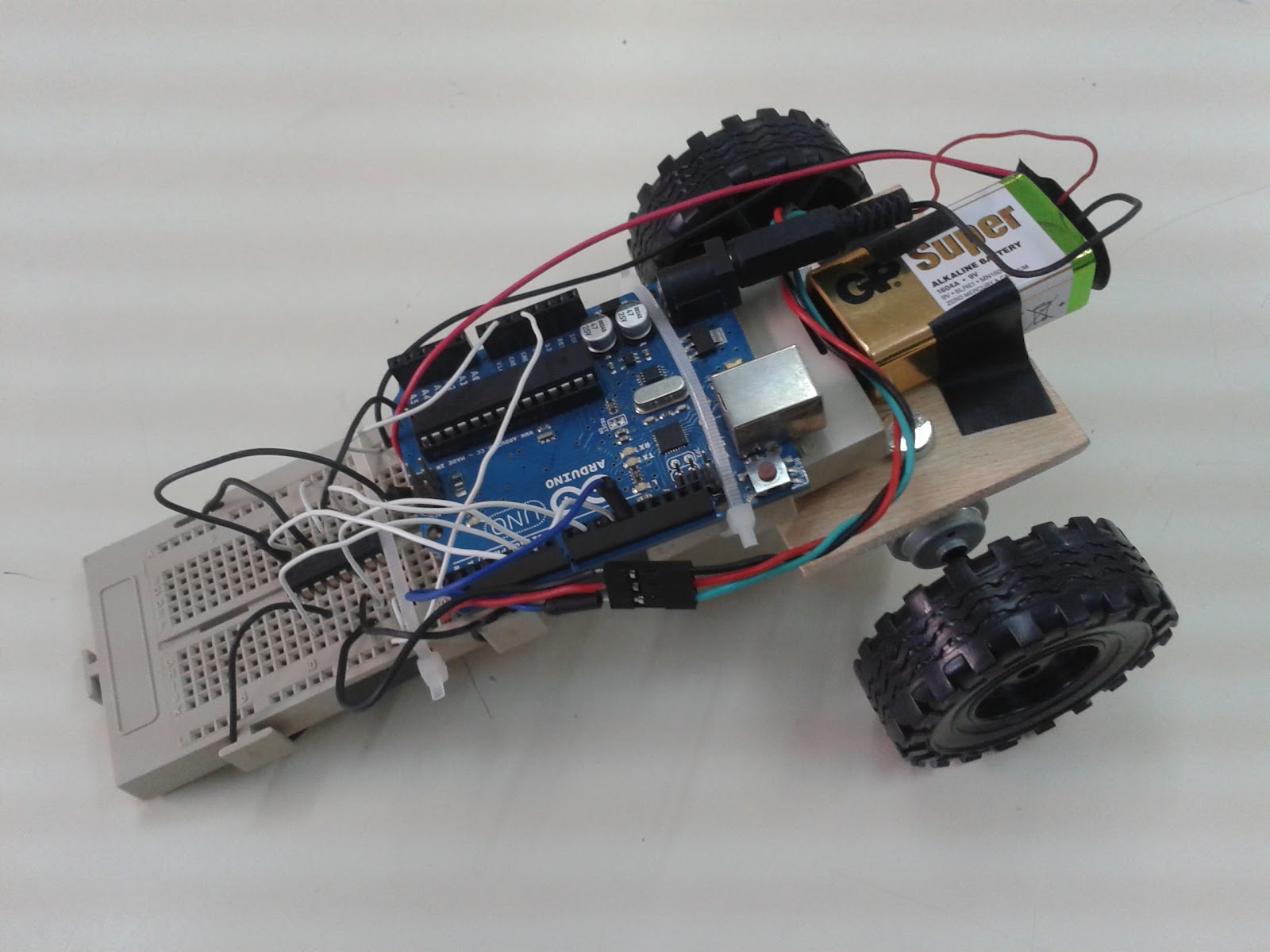
Una vez programado todo el circuito, nos centramos en lo que nos llevó más tiempo: el trabajo de “diseño”. Lo primero que hicimos respecto a esto fue pensar cómo queríamos que quedara el robot. La idea que más nos gustó fue la de poner una tabla en donde insertar las ruedas con los motores en la parte anterior y la protoboard en la posterior. Las ruedas nos fueron proporcionadas por el profesor de la materia en vista de que las ruedas originales no tenían el tamaño adecuado para cumplir su función.
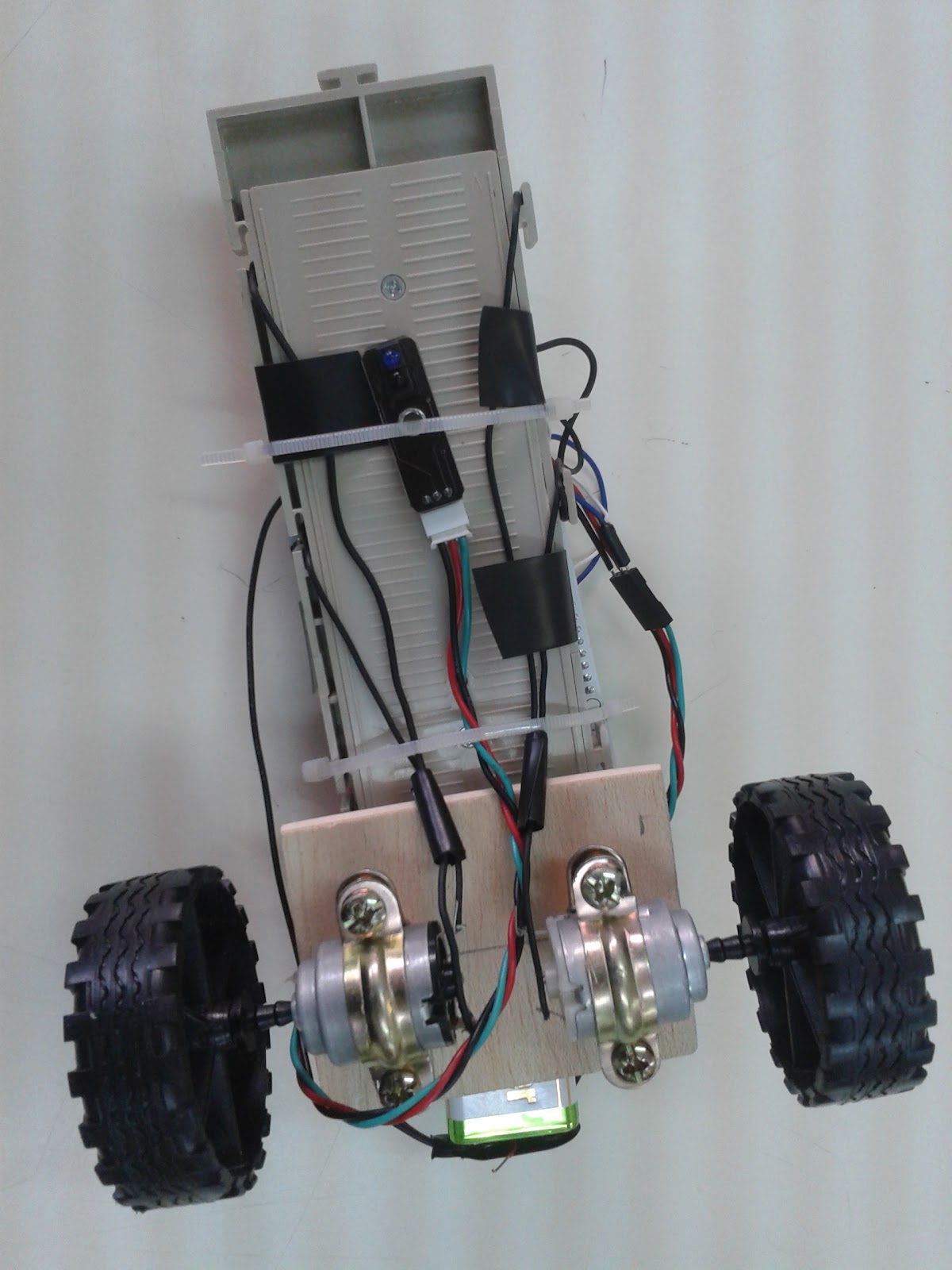
Una vez hecho esto, nos encargamos de enganchar el eje de los motores a la rueda con una pistola de silicona. Ya secado, sujetamos los motores con unas abrazaderas a la placa de madera, que anteriormente ya habíamos cortado y limado.
Para unir la placa protoboard con todo el conjunto anterior, tuvimos la idea de cortar unos tacos de madera y engancharlos con silicona a la placa y a la madera, vigilando que esta quedara centrada.
Con todo esto ya hecho, volvimos al diseño de las conexiones que habíamos buscado al principio y, junto con una pila y un detector de luz, lo conectamos todo adecuadamente. Al hacer esto nos dimos cuenta de lo aparatoso del diseño, así que utilizamos unas bridas para mantenerlo todo más unido.
Finalmente probamos el programa y el prototipo lo siguió correctamente. Desafortunadamente, el fin del trimestre nos ha impedido terminar de programar el código del sigue-línea.
ENLACES DE INTERÉS:
FOTOS Y ESQUEMAS:
Vista desde abajo:
Vista desde arriba:
Esquema del chip:
Rúbrica: https://docs.google.com/spreadsheets/d/1E5R7pWQwpmM4JH9iF82IlOrSj3Vv7fEDcnUdYvyVy08/edit#gid=0
ResponElimina2
2
1
2
2
0
1
1
11